It’s been a busy month working on my contribution to a funded research project for building modular Unmanned Ground Vehicles (UGV) controlled via IoT.

First three prototypes.
The main job of the vehicles is to perform surveillance missions. Each vehicle is connected to the internet via a wireless network or LTE. In case the internet is disconnected, it runs in autonomous mode. It’s equipped with the required sensors and obstacle avoidance algorithms in order to navigate its way back to the base station.
Two controllers are mounted on each vehicle, ATmega8U2 and Raspberry PI. Both are connected via serial communication. The Raspberry PI is responsible for streaming a live video through the mounted camera, to send telemetry data to the cloud, and to receive the commands. The ATmega8U2 is responsible for the vehicles movement and autonomous mode algorithm. It executes the commands received from the Raspberry PI.
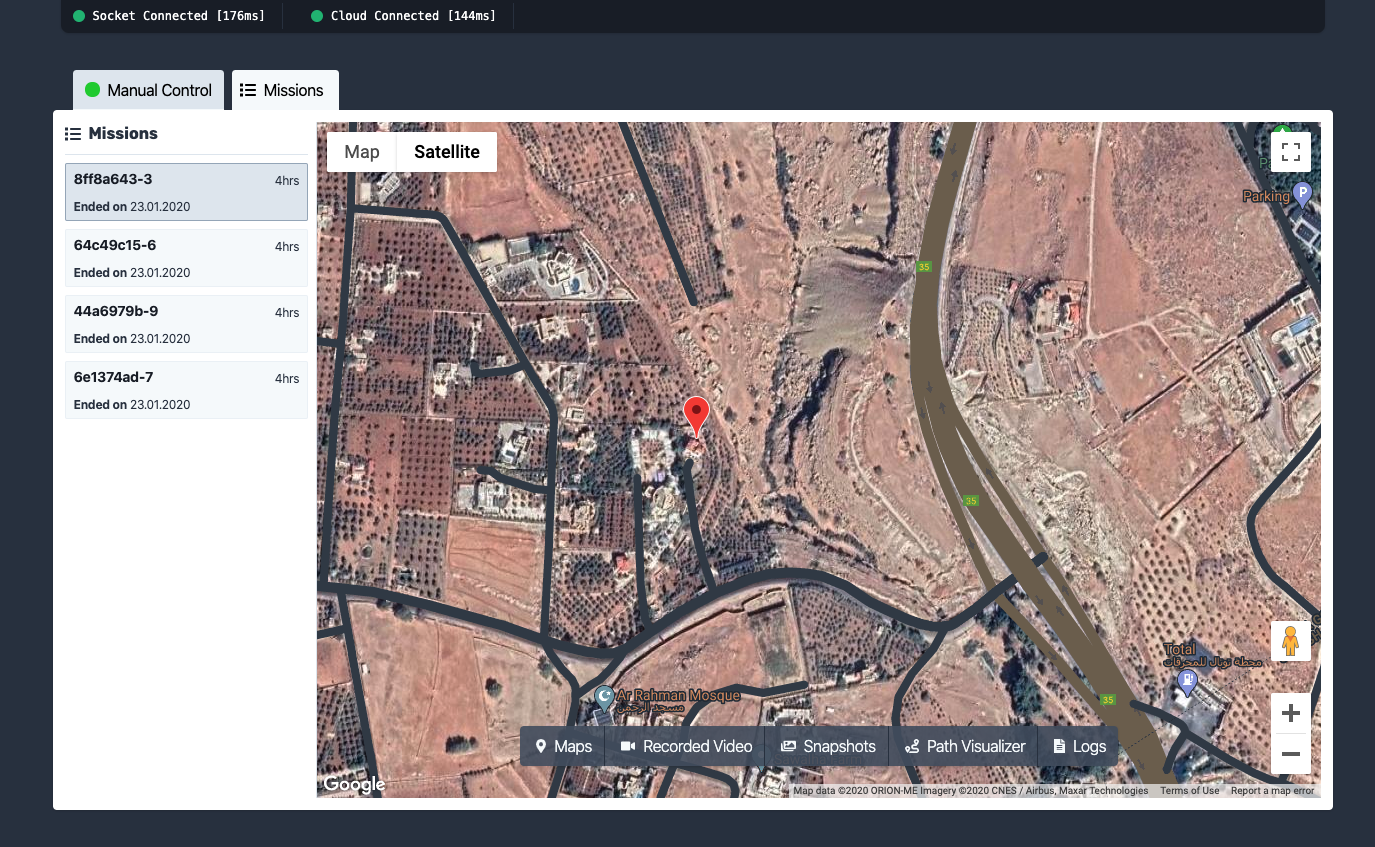
Operation Control Unit
The main contribution of mine is to build a modular architecture of the entire system: from hardware to the software, connect the vehicles to the cloud service, and to design and build the control unit.
The key priority of the architecture design is to create easily reconfigurable modules where each module is responsible for a specific task and can be seamlessly integrated with the other modules. With well-defined interfaces between them, the research teams could independently work and develop any module of interest.
Another feature that’s still under development is V-to-V communication: in case any of the vehicles lost the internet connection, it would look for the nearest internet-connected vehicle and start to send and receive the needed information through it.
It was an intresting project. I may write more technical highlights in future articles. But for now, if you need any further technical information don’t hestitate to contact me via email or Twitter.
Thanks for reading.